一、産品概述
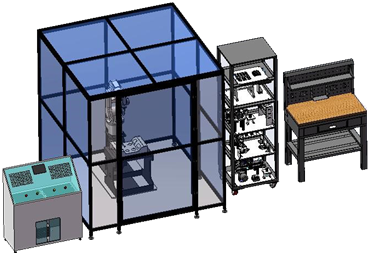
設備由工業機器人系統、PLC控制系統、電控箱、裝配台、安全防護系統以及基礎學習和實訓套件、搬運實訓套件、機床上下料實訓套件、焊接實訓套件、碼垛實訓套件、模拟塗膠實訓套件、裝配實訓套件、伺服變位機實訓套件、自動生産線實訓套件等組成。能完成機器人技術的基礎性培訓教學,學習機器人的基本理論知識和基本操作技能,如機器人基本參數設置、軌迹規劃、示教編程、基本調試、基本維護等技能。
設備采用模塊化設計,各實訓套件電氣相互獨立,可簡易拆裝更換任意套件,使實訓更加靈活,同時增強學生動手能力。
二、功能說明
該裝備采用落地式的安裝形式,保證設備的穩定可靠,同時采用多道防護裝置,包含了有機玻璃防護網、安全門(安全鎖)系統、安全光幕等硬件保護。
設備各套件采用工業标準件設計,可快速牢靠安裝于工作台。設備可進行機械組裝、電氣線路設計與接線、PLC編程與調試、工業機器人編程與調試等多種實訓,能夠完成搬運、碼垛、塗膠、裝配、自動生産線等典型工作任務訓練。除了滿足工業機器人單機的培訓之外,還考慮到機器人與外圍設備之間的配合,将工業機器人和外圍設備看作一個系統整體,以培養能夠對整個系統進行裝配、調試、以及熟練編程等能力為目标,同時滿足職業資格鑒定要求。
三、技術性能
1.交流電源:單相 AC 220 V±10% 50Hz;
2.溫度:-10~50℃;環境濕度:≤90%無水珠凝結;
3.外形尺寸(含防護欄):長×寬×高=(1800×1800×2000)mm(±5%)
4.整機功耗:≤6kW
四、設備結構與組成
(一)工業機器人
1、機器人本體
機器人本體由六自由度關節組成如下圖,固定在型材實訓桌上,活動範圍半徑不小于580mm。

機器人本體
機器人本體具體參數如下:
(1)規格
表1-1 機器人規格
|
型号
|
工作範圍
|
有效荷重
|
|
IRB 120
|
580 mm
|
3 kg
|
(2)特性
表1-2 機器人特性
|
集成信号源
|
手腕設10路信号
|
|
集成氣源
|
手腕設4路空氣(5 bar)
|
|
重複定位精度
|
0.01 mm
|
|
機器人安裝
|
任意角度(支持地面、牆壁、倒裝等多種方式)
|
|
防護等級
|
IP30
|
(3)運動
表1-3 機器人運動
|
軸運動
|
工作範圍
|
最大速度
|
|
軸1旋轉
|
+165°~ -165°
|
250°/s
|
|
軸2下臂
|
+110°~ -110°
|
250°/s
|
|
軸3上臂
|
+70°~ -90°
|
250°/s
|
|
軸4手腕旋轉
|
+160°~ -160°
|
320°/s
|
|
軸5手腕擺動
|
+120°~ -120°
|
320°/s
|
|
軸6手腕回轉
|
+400°~ -400°
|
420°/s
|
(4)性能
表1-4 機器人性能
|
1 kg拾料節拍
|
|
25×300×25 mm
|
0.58 s
|
|
TCP最大速度
|
6.2 m/s
|
|
TCP最大加速度
|
28 m/s2
|
|
加速時間0-1 m/s
|
0.07 s
|
(5)電氣連接
表1-5 機器人電氣連接
|
電源電壓
|
200~600V,50/60Hz
|
|
變壓器額定功率
|
3.0 kVA
|
|
功耗
|
0.25 kW
|
(6)物理特性
表1-6 機器人物理特性
|
機器人底座尺寸
|
180×180 mm
|
|
機器人高度
|
700 mm
|
|
重量
|
25 kg
|
(7)環境
表1-7 機器人環境
|
機械手環境溫度:
|
|
運行中
|
+5℃至 +45℃
|
|
運輸與儲存時
|
-25℃至 +55℃
|
|
短期最高
|
+70℃
|
|
相對濕度最高
|
95%
|
|
選件潔淨室
|
ISO 5級
|
|
噪音水平
|
最高70 dB (A)
|
|
安全性
|
安全停、緊急停
2通道安全回路監視
3位啟動裝置
|
|
輻射
|
EMC/EMI屏蔽
|
2、機器人控制器

機器人控制器
|
控制器型号
|
IRC5緊湊型
|
|
電源
|
單相220V 50-60Hz
|
|
IO卡
|
16位I/O闆(DSQC652 IO模塊 16input/16output)
|
|
特性
|
采用多處理器系統,PCI 總線,奔騰CPU,大容量閃存(256M),20s UPS 備份電源
|
機器人基本控制軟件,ROBOTWARE6.0版本;BaseWare 機器人操作系統;在機器人使用壽命内,使用機器人離線軟件進行實時程序、IO、機器人3D動态動作監控;遠程機器人系統備份與恢複功能;具有自動工具重量與載荷檢測設定功能;具有機器人全壽命保養自動維護檢測系統功能;具有機器人運動軌迹實時微調功能;自帶自定義可編程IO;具有3D實時舒适搖杆手動操作系統;具有電池電量環保節省功能;支持RAPID編程語言規範,并直接解釋執行;機器人控制系統軟件基于WINCE平台,以便基于機器人的二次開發;機器人控制系統原配固态存儲器容量1G,并支持USB擴展為副存儲器;具有緊急停止,自動模式停止,測試模式停止等安全保護措施;控制器帶視頻接口。
3、示教單元
便攜式示教盒,具備操縱杆和鍵盤,彩色觸摸式顯示,具中/英文菜單選項,示教器電纜10m。提供人機對話窗口,界面簡潔大方;采用7吋彩色液晶顯示器及高敏感度觸摸屏,可通過按鍵或鍵盤對機器人進行操作;顯示及監控信息豐富,機器人的當前狀态信息、IO信息、伺服軸的速度、電流以及位置都可實時查詢和監控;機器人各軸伺服參數可以通過示教盒在線設置。
(二)實訓工位
實訓工位單元采用鋁合金框架、有機玻璃、安全門(鎖)的結構組成,由有機玻璃和鋁合金骨架組成透明防護罩。
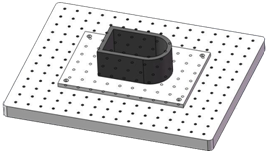
(三)操作對象承載台
操作對象承載台平台底座采用碳鋼焊接而成,工作台面采用厚度20mm的不鏽鋼闆,M6螺紋安裝孔,可快速牢靠安裝多種工作對象。

操作對象承載台效果圖(僅供參考)
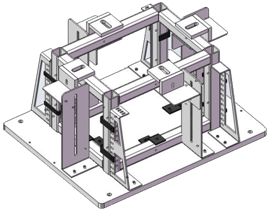
(四)工業機器人安裝台
工業機器人安裝台由地面安裝地闆、機器人安裝底座、機器人安裝底座底闆、機器人安裝面闆、鋼管焊接而成,直接安裝在地面上,保證了設備的穩定運行。

機器人底座效果圖(僅供參考)
(五)控制系統
控制系統主要由可編程控制器、人機界面、氣動系統、電控箱等組成,配備西門子CPU226DC/DC/DC可編程控制器,昆侖通态 TPC1061Ti 觸摸屏。用于控制機器人、電機、氣缸等執行機構動作,處理各單元檢測信号,管理工作流程、數據傳輸等任務。
電控箱帶四個自鎖腳輪,面闆包括機器人輸入、輸出信号檢測口,夾具信号輸入輸出檢測口,模式選擇按鈕,可安裝伺服驅動器、變頻器、觸摸屏、PLC等電氣部件。通過電纜線與實訓工位相連,兩端使用航空插頭,強弱電分離,連接安全可靠。同時含急停、啟動、複位、暫停按鈕、運行指示、停止指示,實訓指示燈,實訓急停開關一隻,漏電開關,空氣開關一隻,開關電源,中間繼電器,中繼轉換闆一套,接線端子一套。線槽一套。

電控箱實物圖(僅供參考)
(六)基礎學習和實訓套件
基礎學習和實訓套件包含軌迹示教模塊和描圖工具各1套,軌迹示教模塊采用不鏽鋼加工制造,通過在平面、曲面上蝕刻不同圖形規則的圖案,可訓練對機器人基本的點示教,直線、曲線運動足迹的掌握;學習點的定位及機器人運動路線選擇優化。描圖夾具采用焊接工裝套件中的焊槍夾具,以焊絲為基準來進行,描圖編程任務。
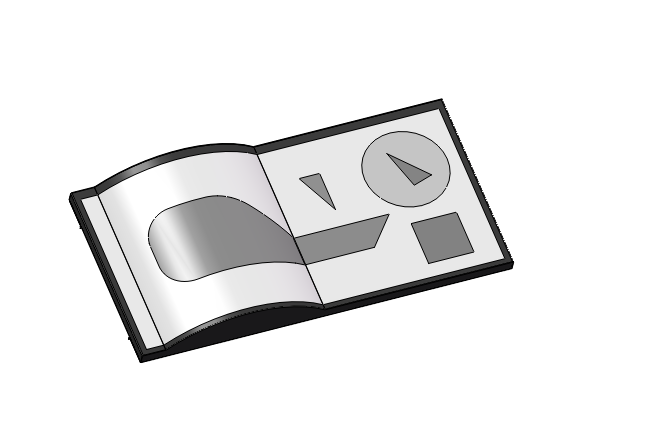
基礎學習套件效果圖(僅供參考)
(七)搬運工作站
搬運工作站包含搬運工作站和吸盤夾具各1套。搬運工作站由兩塊底闆組成,底闆上分别由四組不同形狀和編号的工件組成,有圓形、正方形、六邊形等。可通過不同點對點的搬運訓練提高編程能力。吸盤夾具采用吸盤式夾具,包含真空吸盤、吸盤夾具、機器人法蘭盤連接件等組成。
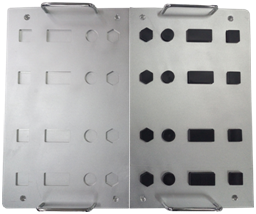
搬運實訓套件(僅供參考)
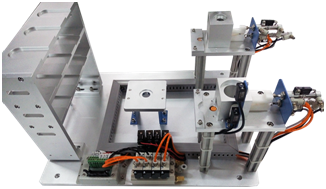
(八)機床上下料實訓套件
機床上下料實訓套件采用鋁合金及鋁型材構建,由落料機構、檢料平台、立體庫、模拟機床氣動卡盤等組成。落料機構包含有推料氣缸、磁性開關、頂料氣缸、物料不足檢測傳感器、檢測平台傳感器,模拟機床氣動卡盤采用兩台機床氣動卡盤組成,成品庫200×90×290mm ,共三層每層有三個工位,裝配台135×120×140mm。機器人夾具等組成,機器人按照機床的不同工藝要求加工時間和周期的不同,進行有效的協調。
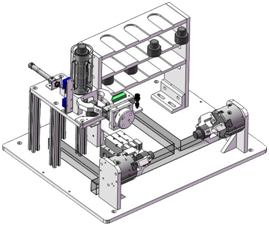
機床上下料實訓套件效果圖(僅供參考)
(九)焊接工裝套件
工件尺寸330×260×200mm,工件原材料30×30×270mm四條,30×30×200mm八條,組合夾具一套組件在20件以上,焊槍等組成,對被焊接對象的多道焊縫進行模拟焊接。
焊接工裝套件效果圖(僅供參考)
(十)碼垛工裝套件
碼垛工裝套件包含碼垛工作站和夾具各1套,碼垛工作站采用鋁材加工氧化的物料擺放底闆和碼垛底闆組成,固定到操作台,根據要求物料塊被擺放到擺放底闆上,機器人通過吸盤夾具按要求拾取物料塊進行碼垛任務,物料塊有長方形和正方形兩種,操作者可根據需要選擇擺放。可根據需要自由組合碼垛出多種形狀,練習對機器人碼垛、陣列的理解并快速編程示教的應用技能。碼垛夾具采用吸盤式夾具,包含真空吸盤、吸盤夾具、機器人法蘭盤連接件等組成。

碼垛工裝套件效果圖(僅供參考)
(十一)模拟塗膠實訓套件
模拟塗膠工裝套件包含塗膠工作站和塗膠夾具各1套,塗膠工作站由套件底闆與被塗膠對象組成,對被塗膠對象的多道軌迹進行模拟塗膠。塗膠夾具由:1隻塗膠槍,夾具本體及法蘭盤連接件組成。
塗膠工作站效果圖(僅供參考)
(十二)裝配工裝套件
裝配工作站包含兩套供料機構、料台檢測、一個裝配台,一個三層三列的立體庫組成。具有外形工件料倉和内工件料倉,分别包括料台、料筒、頂料機構、推料機構頂料機構、料台平台傳感器、物料不足傳感器、成品庫200×90×290mm,三層每層有三個工位,裝配台135×120×140mm,氣動夾具等。能按照主令信号的要求對儲存在立體庫中的零件取出,并進行裝配,并放到指定的位置。
裝配實訓套件(僅供參考)
五、配套資源
本設備配套提供機械工業出版社出版的ABB機器人教材三種1套:《工業機器人實操與應用技巧》、《工業機器人典型應用案例精析》、《工業機器人工程應用虛拟仿真教程》。
六、實訓項目
(1)工業機器人的基本認識工作任務。
(2)工業機器人示教器運動操作工作任務。
(3)工業機器人的點位示教工作任務。
(4)工業機器人基本參數設置工作任務。
(5)工業機器人基本運動指示工作任務。
(6)工業機器人基于示教器的程序編輯工作任務。
(7)工業機器人IO控制應用工作任務。
(8)工業機器人基本接線方法工作任務。
(9)PLC和多關節智能手腕的配合使用
(10)觸摸屏和智能手腕的配合使用
(11)變頻器和智能手腕的配合使用
(12)伺服和智能手腕的配合使用
(13)簡單軌迹運行工作任務。
(14)平面圓形描圖工作任務。
(15)平面矩形描圖工作任務。
(16)曲面圓形描圖工作任務。
(17)曲面矩形描圖工作任務。
(18)固定位置搬運工作任務。
(19)平面矩陣碼垛工作任務。
(20)斜面位置搬運裝配工作任務 。
(21)平面矩陣立體碼垛工作任務。
(22)塗膠編工作任務。
(23)模拟焊接工作任務。
(24)工件裝配工作任務。
(25)機床上下料工作任務。
(26)伺服電機變位機的應用。